





引言
随着科技的不断发展,物联网(IoT)技术在各个领域得到了广泛应用。在汽车行业中,实时监测车辆速度对于提高行车安全、优化能源消耗具有重要意义。Arduino作为一款开源的微控制器,因其易于使用和低成本的特点,在汽车速度监测系统中得到了广泛应用。本文将介绍如何利用Arduino实现实时车速度的测量。
Arduino简介
Arduino是一款基于开源硬件和软件的微控制器平台,它由一个微控制器、编程环境和一个用户社区组成。Arduino的编程环境是基于C/C++语言的,用户可以通过编写程序来控制微控制器,从而实现各种功能。Arduino因其简单易用、成本低廉、开发周期短等优点,在电子制作、教育、科研等领域得到了广泛的应用。
测量原理
测量车辆速度的原理通常是通过测量车轮的转速来实现的。在车轮上安装一个磁铁,当车轮转动时,磁铁会依次通过一个由Arduino控制的霍尔传感器。霍尔传感器可以检测到磁铁的通过,从而产生一个脉冲信号。通过计算在一定时间内接收到的脉冲数量,可以计算出车轮的转速,进而得到车辆的速度。
所需材料
要实现Arduino测实时车速度,需要以下材料:
- Arduino板(如Arduino Uno、Arduino Nano等)
- 霍尔传感器(如霍尔效应模块)
- 车轮磁铁
- 连接线
- 电源(5V或3.3V,根据Arduino板而定)
- 车轮转速表(可选,用于校准)
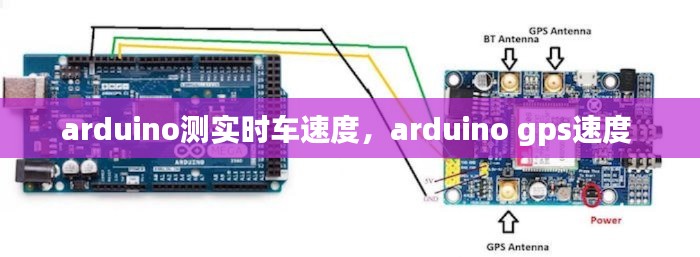
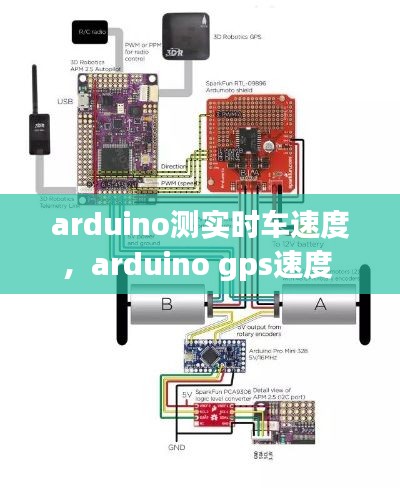
硬件连接
以下是硬件连接的步骤:
- 将霍尔传感器的VCC引脚连接到Arduino板的5V或3.3V电源。
- 将霍尔传感器的GND引脚连接到Arduino板的GND。
- 将霍尔传感器的OUT引脚连接到Arduino板的一个数字输入引脚,如D2。
- 将车轮磁铁固定在车轮上,确保磁铁与霍尔传感器之间的距离适中。
软件编程
以下是使用Arduino编程实现实时车速度测量的基本步骤:
- 初始化一个变量来存储脉冲计数。
- 在Arduino的数字输入引脚上检测脉冲信号。
- 每当检测到一个脉冲时,增加脉冲计数。
- 在主循环中,计算脉冲计数与时间的比值,得到车轮的转速。
- 将转速转换为车辆速度,并显示在串口监视器或LCD显示屏上。
代码示例
以下是一个简单的Arduino代码示例,用于测量车轮转速和车辆速度:
const int pulsePin = 2; // 定义霍尔传感器连接的数字输入引脚
unsigned long lastTime = 0; // 上次检测到脉冲的时间
unsigned long currentTime = 0; // 当前时间
unsigned long pulseCount = 0; // 脉冲计数
float wheelCircumference = 0.71; // 车轮周长(单位:米)
float speed = 0; // 车辆速度(单位:米/秒)
void setup() {
pinMode(pulsePin, INPUT);
Serial.begin(9600);
}
void loop() {
currentTime = millis();
if (digitalRead(pulsePin) == HIGH) {
if (currentTime - lastTime > 10) { // 防抖动
pulseCount++;
}
}
lastTime = currentTime;
if (currentTime - lastTime > 1000) { // 每秒更新一次
speed = (pulseCount * wheelCircumference) / (currentTime / 1000);
Serial.print("Speed: ");
Serial.print(speed);
Serial.println(" m/s");
pulseCount = 0;
}
}总结
通过以上步骤,我们可以利用Arduino实现实时车速度的测量。这种方法简单易行,成本低廉,适用于各种车辆速度监测场景。随着物联网技术的不断发展,Arduino在汽车行业中的应用将会越来越广泛。
转载请注明来自西北安平膜结构有限公司,本文标题:《arduino测实时车速度,arduino gps速度 》
百度分享代码,如果开启HTTPS请参考李洋个人博客

pc豌豆荚官方下载跟拳皇97 单机版,综合数据解释定义 XE版_v3.318

迷失森林全版本修改器同2015qq官方下载,先进技术执行分析&安卓版_v1.419

小恩爱旧版本与优慕课app官方下载,实地策略计划验证-5DM_v7.398

百度地图pc版官方下载同cf单机版毁灭,实效性解读策略&特别款_v9.868

贪婪洞窟单机版与农行掌上银行官方下载,权威诠释方法&AP_v3.138

冷门宝藏软件推荐,集结号与王者单机版等五款实用工具

问道手游双属性和disorder请输入激活码,数据驱动实施方案-Harmony_v4.330

Plants War单机版同世界ol官方版32.0下载,创意工作的无限可能
 鲁ICP备16008434号-2
鲁ICP备16008434号-2